Virtual Robot - Transferring Content
Virtual Robot > Transferring Content
This page applies to pre 2017 Tritium robots, for 2017 onwards robots please see Virtual Robot Content Organizer, for earlier IOServe based robots please see Virtual Robot - Transferring Content (IOServe)

Contents
Introduction
Virtual Robot provides a simple to use web based tool for content creation on EA robots like RoboThespian and SociBot.
This page shows you how to transfer content from Virtual Robot to any robot, even while the robot is switched off.
Transfer content to real robot
Having created an animation and saved the file, it may be transferred to a real robot.
When the robot is connected to the internet it will download the animation and play it once to confirm.
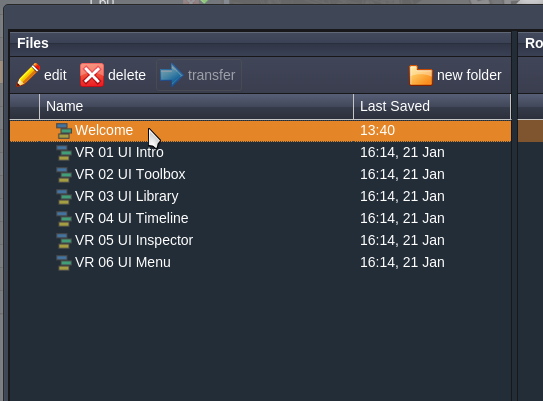
Select "Transfer" in the drop down "File" Menu on the Menu Bar
Highlight the animation(s) you wish to transfer by clicking on them
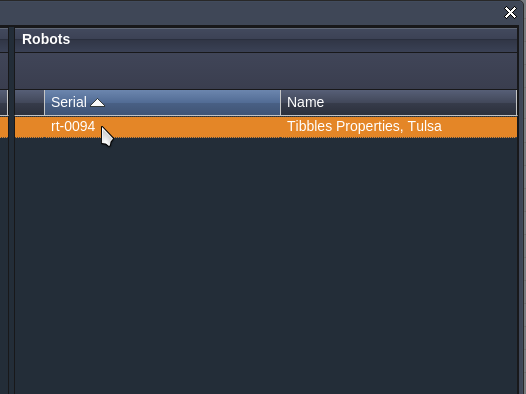
Click on the robot you wish to transfer the animation(s) to
Click on "transfer" on the transfer window Menu Bar
You can close the window at any time after clicking transfer.
Reopen the "Transfer" window at any time to check progress.
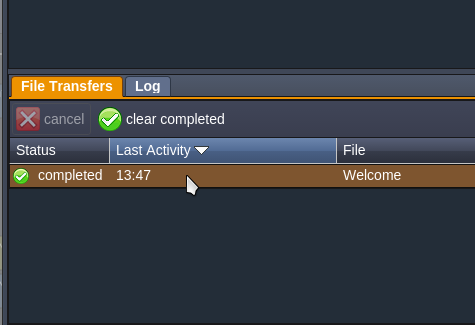
After the animation transfers to the robot, a tick will appear in the File Transfer box to confirm transfer
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Finding Your Sequences on the Robot
Files are transferred to the robot as Sequences under the Asset directory '/sequences/user/<username>/'. Which can be accessed through the Asset Manager's UI under Sequences > user > your username. But the details of this interface are out of the scope of this page. You can find more information here Tritium_GUI_Assets
Audio assets can be found in the same way. However the names of these assets can be unrecognisable, and you usually needn't worry about them.
Troubleshooting
If you experience issues transferring content or with Virtual Robot in general please see Virtual Robot Troubleshooting