Ameca
(Redirected from Ameca - overview)
Jump to navigation
Jump to search

Overview
- These pages are for First Generation Amecas running on our Tritium 2 framework
- For Gen 2 Amecas running on Tritium 3 please see https://docs.engineeredarts.co.uk/
- If asked to "Select Authentication Provider" choose Tritium
- If you are not sure what version Ameca you have, or if require an additional Tritium login, please contact us with your Ameca's serial number.
- Designed specifically as a platform for development into future robotics technologies, Ameca is a humanoid robot platform for human-robot interaction.
- The Ameca pages in this wiki serve as an introduction, user guide, and cover technical aspects of Ameca and its operation.
- For a more visual introduction to Ameca see our website
See also
Ameca videos and photos
- Engineered Arts on YouTube
- Engineered Arts videos on Vimeo
- For product photos of Ameca, and/or photos of Ameca interacting please contact us at press@engineeredarts.co.uk
Note: photos and videos are provided for reference only and subject to our copyright. They are not to be published or used further without permission from Engineered Arts Ltd.
Brochure and technical specification

Download the Ameca Gen 2 Brochure (pdf) for:
- Key features
- Interaction features
- Gestures and expression examples
- Technology integration (software and hardware)
- Software
- Mechanical specification
- Ameca Gen 1 Brochure available here for reference
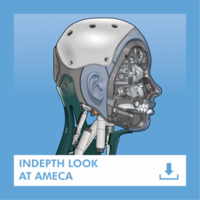
Download the Ameca In-depth Look (pdf) for:
- In depth look at the head, eyes, face and mouth
- Illustrations of the extended arm movement
- Illustrations of the torso movement
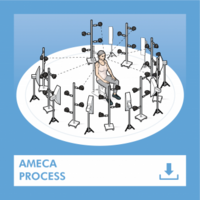
Download the Ameca Creation Process (pdf) for:
- Step by step guide to the production process of Ameca
Degrees of movement

- There are 61 articulated movements in generation 2 Ameca, and 51 in generation 1 Ameca
- Download the Ameca Gen 2 - Degrees of Movement (pdf) to see them
- Ameca Gen 1 - Degrees of Movement (pdf) available here for reference
Installation
Installation requirements
- Suitable for indoor use only. Recommended room temperature: 10°C - 30°C, relative humidity: 45% - 60%
- Standard domestic mains power in the range 100v - 250v AC
- If in a public environment: a barrier to prevent contact between visitors and Ameca
- Or staff in attendance
Network requirements
- Wired internet connection with good bandwidth:
- See Robot Network Configuration for Gen 3 Ameca
- see Network Setup for Gen 2 Ameca
Mounting
- Ameca is mounted on supplied weighted base
- Base can be mounted onto a stage
- See Media:Ameca base setup v1.pdf
Set-up guide
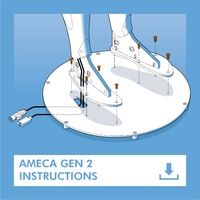
Ameca Gen 2
- Download the Set-up Guide for Ameca Gen 2 (pdf)
- An install by one of our engineers is required in the first instance
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
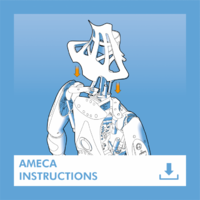
Ameca Gen 1
- Download the Set-up Guide for Ameca Gen 1 (pdf) with or without a Show Controller
- An install by one of our engineers is required in the first instance
Safety guidelines
Please see the following .pdf for guidelines on safe usage of Ameca:
Ameca safety guidelines
Programming
Creating new movements
- Virtual Robot is our tool for generating movement animation that can be called from Python or via the RESTful API
- The video below gives a quick introduction
- It is also possible to produce animation programmatically as required
Programming Ameca
Ameca Gen 2 runs on our latest Tritium 3 robot software framework
- See the Tritium 3 and robot documentation
- If you do not already have access but would like further information please contact info@engineeredarts.co.uk
Ameca Gen 1 runs on our Tritium 2 robot software framework
- See the Tritium user guide
- The simplest way to program is using the built in Python IDE
- Ameca can also be controlled remotely
Local install of Tritium
- We are planning to release a locally installed version of Tritium
- This will run on Windows 10 or Linux and connect to cloud based IDE and robot simulator, allowing developing code without having robot hardware
Cleaning
Silicon trim
- Gently clean with small amount of isopropyl alcohol (maximum 70% alcohol) on a clean lint free cloth
- Isopropyl alcohol wipes (max 70% alcohol) work well
- This can also be in the form of alcohol cleaning wipes
- After cleaning brush on some talcum powder with a soft make up brush
- This takes off the shine, and stops the silicon being sticky or oily
- Note that over time the silicon can release a little oil, this is a natural process. A light brush with talcum powder will resolve this.
Plastic trim / shells
- Gently clean with small amount of isopropyl alcohol (maximum 70% alcohol) on a clean lint free cloth
- Isopropyl alcohol wipes (max 70% alcohol) work well
- Be gentle and stop immediately if paint is being removed
Troubleshooting
- Check the troubleshooting pages in the Ameca documentation here
Getting further support
- Check the troubleshootingpages in the Ameca documentation on this wiki first, your question may already be answered.
- If you can't find the answer you are looking for, open a support ticket and we will get back to you as soon as possible - see our Support Policy
- If there is an urgent issue and you are not familiar with Ameca yet, do email or call us
- We have launched a Discord server dedicated to Ameca where you can keep up to date on developments as well as ask some of our awesome engineers about robots. Invite link here