Virtual Robot - Animating a Seated RoboThespian
Virtual Robot > Animating a Seated RoboThespian

Contents
Introduction
RoboThespian can be supplied in a seated position as an option.
In this case, there are a couple of variations to animating the robot to take note of to prevent the robot hitting his own legs and damaging hands/arms.
Safe start pose for seated RoboThespians
Virtual RoboThespian is setup for standing robots.
When starting a new animation the default RoboThespian pose will cause the hands to hit the legs.
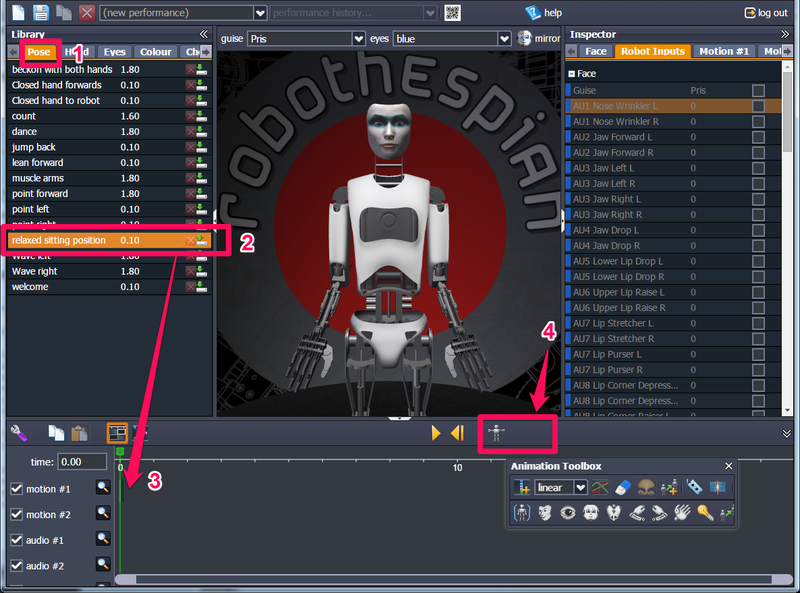
From the pose library (1) add the relaxed sitting position (2) to 0 seconds (3) of each new animation. In this way the animation will start from a position that does not hit the legs.
When animating the robot take note of the guidance below to avoid hitting the legs during a performance.
Animation guidance
Don't go below Elbow 1600 when hands in karate chop position (i.e. Forearm 1800):


Don't go below Elbow 1650 if wrists bent down:

Above assumes back straight during movements. If leaning forwards at maximum (Torso Bend Forward 1950) don't go below Elbow 1800:

Relaxed Sitting Position technical details (for info only)
Symmetrical and rest of outputs as per usual default starting pose (back straight upright, head level etc.)
- Forearm: 900 - forearms rotated so hands palm down
- Elbow: 1550 - raises forearms out of harms way
- Wrist: 1700 - relaxed a little so not unnaturally rigid
- Twist: 1900 - arms twisted out a little to match spread of legs:


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}