Virtual Robot - Converting robot model
Jump to navigation
Jump to search
Virtual Robot > Converting robot model

Contents
Overview
Virtual robot supports a range of different robot models.
You may have multiple physical robots and want to convert content for use on a different physical robot.
You can access different models to work with using the Robots menu, then select desired model. This loads the desired model and starts a new performance.
Conversions procedure
- Open performance
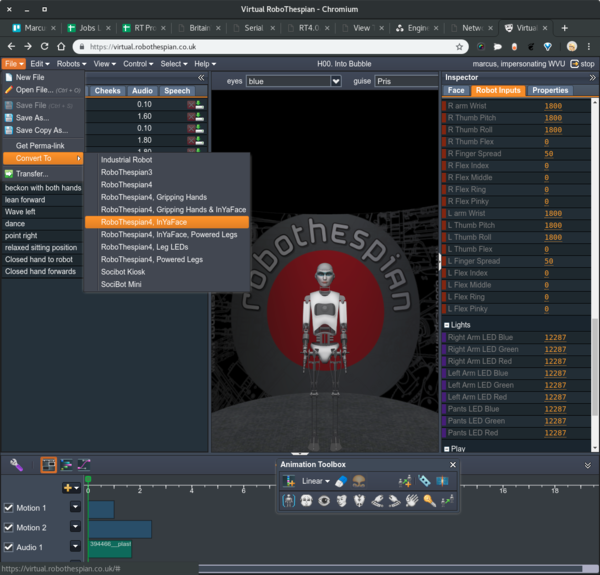
- Click File >> Convert To >> pick the robot model to convert to
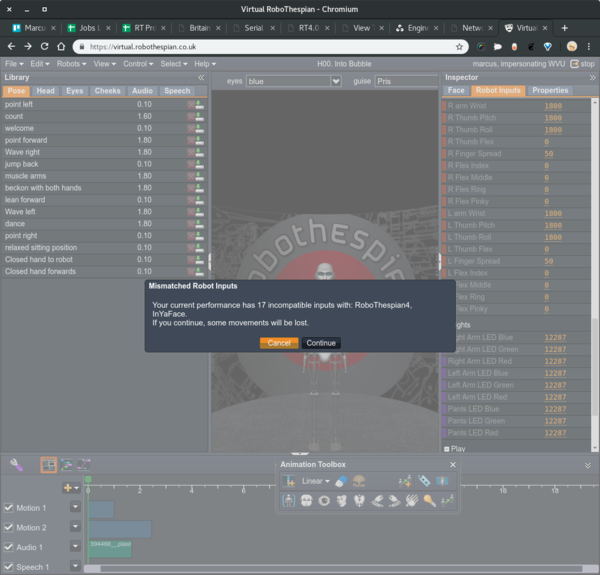
- You may see a warning that some movements will be lost. Continue.
- For example if you change from "RoboThespian4, Gripping Hands & InYaFace" to "RoboThespian4, InYaFace" if you added finger movements these will be lost as the gripping hand fingers have different outputs
- Re-add any lost outputs / movements if required
- Click File >> Save to save the converted performance with the same name.
{kind=link}
{kind=link}
{kind=link}
{kind=link}