Difference between revisions of "Virtual Robot - Animating a Seated RoboThespian"
(→Safe start pose for seated RoboThespians) |
(→Safe start pose for seated RoboThespians) |
||
| Line 13: | Line 13: | ||
From the pose library (1) add the relaxed sitting position (2) to 0 seconds (3) of each new animation. In this way the animation will start from a position that does not hit the legs. | From the pose library (1) add the relaxed sitting position (2) to 0 seconds (3) of each new animation. In this way the animation will start from a position that does not hit the legs. | ||
| − | |||
| − | |||
<div><ul> | <div><ul> | ||
| Line 20: | Line 18: | ||
</ul></div> | </ul></div> | ||
| + | In the future a button will be added at (4) to reset the robot to seated pose. | ||
| − | + | When animating the robot take note of the guidance below to avoid hitting the legs during a performance. | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
==Animation guidance== | ==Animation guidance== | ||
Revision as of 15:45, 18 April 2016
Virtual Robot > Animating a Seated RoboThespian

Introduction
RoboThespian can be supplied in a seated position as an option.
In this case, there are a couple of variations to animating the robot to take note of to prevent the robot hitting his own legs and damaging hands/arms.
Safe start pose for seated RoboThespians
Virtual RoboThespian is setup for standing robots.
When starting a new animation the default RoboThespian pose will cause the hands to hit the legs.
From the pose library (1) add the relaxed sitting position (2) to 0 seconds (3) of each new animation. In this way the animation will start from a position that does not hit the legs.
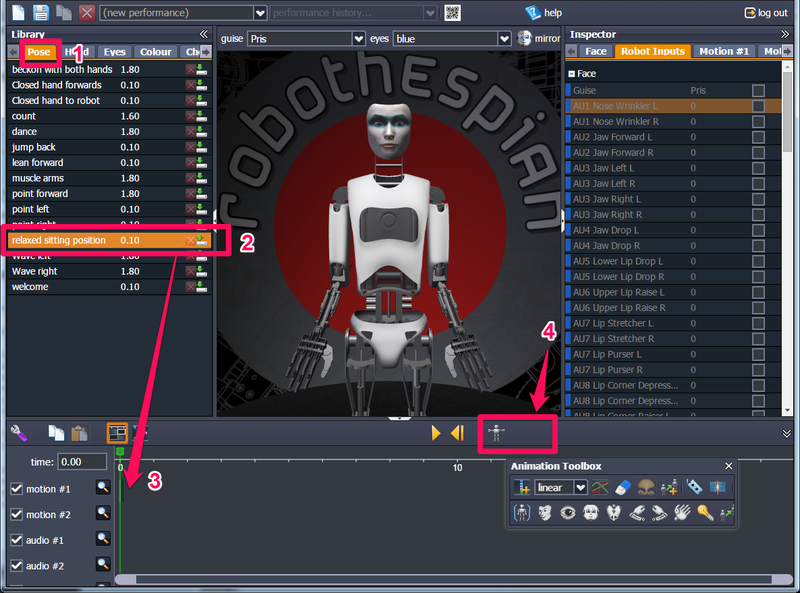
In the future a button will be added at (4) to reset the robot to seated pose.
When animating the robot take note of the guidance below to avoid hitting the legs during a performance.
Animation guidance
Don't go below Elbow 1600 when hands in karate chop position (i.e. Forearm 1800):


Don't go below Elbow 1650 if wrists bent down:

Above assumes back straight during movements. If leaning forwards at maximum (Torso Bend Forward 1950) don't go below Elbow 1800:

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}