Difference between revisions of "RoboThespian"
(Created page with "Category:RoboThespian Category:Public = RoboThespian User Documentation = == Introduction == This section of the Wiki provides information on installing, using and m...") |
|||
| Line 2: | Line 2: | ||
[[Category:Public]] | [[Category:Public]] | ||
= RoboThespian User Documentation = | = RoboThespian User Documentation = | ||
| + | == Model Variations == | ||
| + | Although most of their software architecture and functional operation is the same, there are some differences between RoboThespian versions. This will be highlighted on relevant pages | ||
| + | |||
| + | <div><ul> | ||
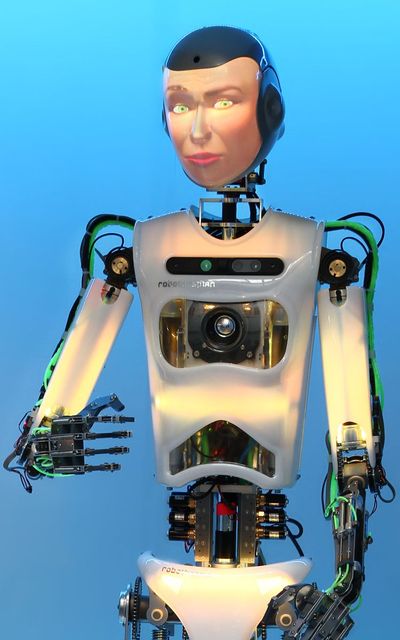
| + | <li style="display: inline-block;">[[File:main_robothespian.jpg|thumb|none|400px|link=|RoboThespian (Hard Face)]]</li> | ||
| + | <li style="display: inline-block;">[[File:main_robothespian_projected_face.jpg|thumb|none|400px|link=|RoboThespian (Projected Face)]]</li> | ||
| + | </ul></div> | ||
| − | |||
| − | |||
| − | |||
You will also find a complete list of categorised pages [[Special:Categories |here]]. | You will also find a complete list of categorised pages [[Special:Categories |here]]. | ||
Revision as of 15:23, 24 February 2016
RoboThespian User Documentation
Model Variations
Although most of their software architecture and functional operation is the same, there are some differences between RoboThespian versions. This will be highlighted on relevant pages

{kind=link}
{kind=link}
You will also find a complete list of categorised pages here.
Guide to RoboThespian Robots
This wiki serves as a guide to the different RoboThespian Robots. Although much of their software architecture and functional operation is the same, there are some differences between the versions, which can be seen chiefly in the hardware layout and the expected applications. All robot versions have an on-board CPU that runs on Ubuntu Linux; the standard model comes with in-built hi-def headcam. A chest-mounted IR depth sensor and stereo camera give additional visual information. The head is mounted on a 3DoF motor-driven articulated neck which give a human-appropriate range of head gestures.
Where necessary, robot-specific version information can be found under separate subheadings; however unless otherwise noted, the guides in this wiki are pertinent for all RoboThespian Robots.