Virtual Robot - Animation Terms & Definitions
Virtual Robot > Animation Terms & Definitions

Contents
Anticipation
An anticipation in animation is a pose which prepares the audience for a movement. They can be subtle with small moves or big visual gags for larger movements. An example of this would be someone throwing a ball. The anticipation is the pose when the arm goes backwards and holds for a split second before the action, which is the throw itself. VR works at 10 frames per second, and Robothespian doesn't always represent every frame you key during its movements. So for Robothespian anticipations should be used to exaggerate a comedy moment or a bold movement if the anticipation pose is given enough time so it reads on the robot when played back.
Arcs
Arcs give a body part a more natural motion and better flow. Hands, Elbows and Nose are particular body parts on Robothespian which can create good arcs.
Breakdown
A breakdown is an intermediate key between key (extreme) poses. The example below shows a simple movement from one key pose at (0.0) to another at (4.0). The breakdown key is at (2.0)
The interpolation between the keys is set to linear. If we leave the computer to do the interpolation and set a key at (2.0) we get a very accurate mid point. The movement however is equally spaced over time and the limbs will travel in a straight line to their destination key.
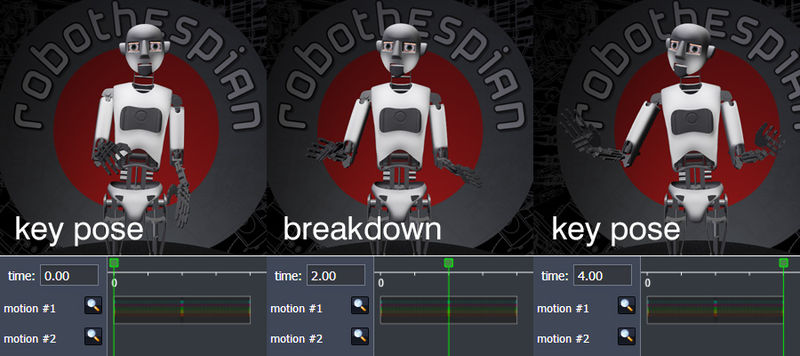
To improve this, an animator will create a better breakdown key to control the spacing of the movement and the arc the body part travels along to its destination key.
Depending on the affect you wish to create, body parts can favour the previous or next key.
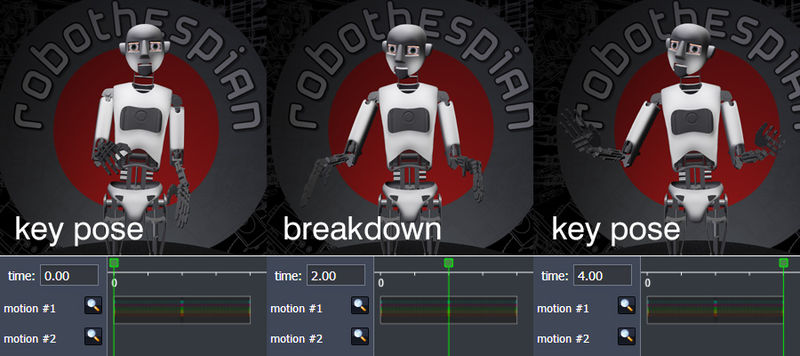
Favouring
Favouring means a pose is closer in position to the next previous key pose, so will have less or further distance to travel over a period of time. This creates interesting timing. Notice at the breakdown key the body is nearly at its final destination and the head makes an arc shape instead of a straight turn.
Followthrough / Overlapping
Followthrough & overlap is a combination of techniques used to bring life to movements by exaggerating them. In VR this involves creating bold movements with correct timing so the movement reads when played on a Robothespian. For example: a wrist flick, where the upper arm motion stops first and the forearm, then wrist followthrough with the motion, creating an overlap in movement.
FPS
Frames Per Second. VR plays content at 20 frames per second.
Frame
A devision of time. VR's timeline is divided by 1/50ths of a second. There are twenty of which per second, so VR plays at 20 frames per second.
Idle
An idle is a looping animation which keeps Robothespian moving whilst waiting or doing nothing. Idles can be subtle and may only involve slight head movements and eye movements, others might involve body turns or slight pose changes. The idea is to keep the robot doing things, looking alive whilst doing very little. An idle loop usually starts and ends with the same pose.
Key Frame
In Virtual Robothespian any key set to the timeline is referred to as key frame.
Key Pose
An important or extreme pose.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Moving Hold
When animating for Robothespian you will often want to move into a pose and hold it still, sometimes for long periods of time. A moving hold is commonly used in animation when a character moves into a pose and holds in the pose for a short moment. They do not freeze at that moment, the movement coming into the pose is continued slightly, this is called Overshoot, then the body will settle into the pose before anticipating and moving off to the next pose. All of this is done with smooth continuous movement at varying speeds. Such animation with VR and Robothespian is tricky, but can be achieved with a few simple keys and a little testing.
Twinning
Twinning refers to when two body parts on opposite sides of Robothespian's body move the same way. A difficult thing to avoid when Robothespian is locked at the waist and has limited gesturing capabilities. Mirrored gesturing is quite common in human communication and not necessarily are bad thing. Movement between poses however, can be offset slightly to make things visually interesting.